題名:掃除機ロボットの人工知能能力の進化に関する一考察
報告者:ナンカイン
今の家電の中でも最も人工知能が進んでいるものと言えば、掃除機になるであろう。掃除機ロボットの代名詞でもあるルンバは、2017年1月30日現在での最新型はルンバ980になるが、ルンバ980はアプリ「iRobot(R) Home」で別の部屋にあるルンバを遠隔で操作し、清掃モードの設定やスケジュールの管理、 外出先から清掃を開始することも可能となった1)。そのため、古くからルンバに注目していた人であれば、年々とルンバも進化していることが分かる。また、そのようなアプリへの対応だけでなく、ルンバ980の知能に関して特筆すべき点は、従来のナビゲーション技術であった「iAdapt」が、vSLAM(Visual Simultaneous Localization And Mapping)技術を導入して、「iAdapt 2.0」に進化したことにある2)。このvSLAMの技術は文献2)に分かりやすく記載されているが、「アメリカの西部開拓時代に活躍した2人の探検家であるメリウェザー・ルイスとウィリアム・クラークは、東海岸のセントルイスを出発し、地図を作りながら1年半をかけて西海岸に到達したが、帰り道はわずか6カ月であった。その理由は、地図を持っていたから」とiRobotの創業者のコリン・アングル氏の比喩でもあるように、ルンバ980は登載したカメラ(Visual)によって、瞬時に(Simultaneous)、各部屋の位置把握と地図作成( Localization And Mapping)を行って掃除しているのである。一般的に掃除機ロボットの人工知能とアルゴリズム(物事を行うときの「やり方」3))に関して、いくつかの手法があり、やみくもに走行する、①ランダム型、数種類の動きを繰り返す、②パターン型、人工知能がセンサーからの情報の状況に合わせて最適なパターンを選択する、③人工知能+パターン型、人工知能がセンサーで収集した情報を元に地図作成を行ってルート決定する、④人工知能+マッピング型があるが4)、ルンバ980は③+④のタイプへと進化したことになる。そのため、先のアプリでルンバ980による掃除の状況を確認すると、図のようにくまなく部屋が掃除されていることが分かる。言い換えれば、ルンバ980曰く「掃除しながらですが、あなたの家の構造はすでに把握していますよ。」ということになるであろう。このことから、ルンバにはヒトの目に相当する判断がすでにあることになる。その次にルンバに登載されるセンサーは、
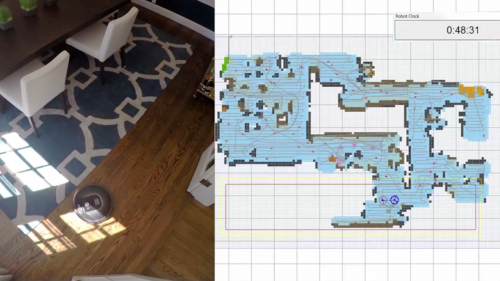
図 ルンバ980による掃除の状況4)
やはり鼻に相当するにおいセンサーになるであろうか。ルンバににおいセンサーが登載されると、「ここが妙に臭かったので、しっかりと掃除しときました。」と判断される日もそう遠くはなさそうではある。
1) http://item.rakuten.co.jp/irobotstore/roomba980060/?scid=af_pc_etc&sc2id=197901914 (閲覧2017.1.30)
2) http://www.itmedia.co.jp/lifestyle/articles/1509/29/news125.html (閲覧2017.1.30)
3) http://research.nii.ac.jp/~uno/algo_3.htm (閲覧2017.1.30)
4) http://www.robotshop.com/blog/en/irobot-roomba-980-now-available-robotshop-18599 (閲覧2017.1.30)